Neural networks generalize because of this one weird trick
13Vanessa Kosoy
9Adrià Garriga-alonso
4Jesse Hoogland
8Jesse Hoogland
7Frank Seidl
6Jesse Hoogland
3Vinayak Pathak
3Jesse Hoogland
5Vinayak Pathak
7Garrett Baker
3Lucius Bushnaq
3Jesse Hoogland
3Leon Lang
3tgb
6Jesse Hoogland
2tgb
2Jesse Hoogland
2tgb
2Jesse Hoogland
2tgb
1Jesse Hoogland
3Jonathan_Graehl
7Jesse Hoogland
2Ulisse Mini
1Jesse Hoogland
2Jonathan_Graehl
1Jesse Hoogland
1Review Bot
1Review Bot
1RiversHaveWings
1Jesse Hoogland
1ai dan
2Jesse Hoogland
1Algon
3Jesse Hoogland
Statistical learning theory is lying to you: "overparametrized" models actually aren't overparametrized, and generalization is not just a question of broad basins.
To first order, that's because loss basins actually aren't basins but valleys, and at the base of these valleys lie "rivers" of constant, minimum loss. The higher the dimension of these minimum sets, the lower the effective dimensionality of your model.[1] Generalization is a balance between expressivity (more effective parameters) and simplicity (fewer effective parameters).
In particular, it is the singularities of these minimum-loss sets — points at which the tangent vanishes — that determine generalization performance. The remarkable claim of singular learning theory (the subject of this post), is that "knowledge … to be discovered corresponds to singularities in general" [1]. Complex singularities make for simpler functions that generalize further.
Mechanistically, these minimum-loss sets result from the internal symmetries of NNs[2]: continuous variations of a given network's weights that implement the same calculation. Many of these symmetries are "generic" in that they are predetermined by the architecture and are always present. The more interesting symmetries are non-generic symmetries, which the model can form or break during training.
In terms of these non-generic symmetries, part of the power of NNs is that they can vary their effective dimensionality. Generality comes from a kind of internal model selection in which the model finds more complex singularities that use fewer effective parameters that favor simpler functions that generalize further.
Complex Singularities⟺Fewer Parameters⟺Simpler Functions⟺Better GeneralizationAt the risk of being elegance-sniped, SLT seems like a promising route to develop a better understanding of generalization and the limiting dynamics of training. If we're lucky, SLT may even enable us to construct a grand unified theory of scaling.
A lot still needs to be done (in terms of actual calculations, the theorists are still chewing on one-layer tanh models), but, from an initial survey, singular learning theory feels meatier than other explanations of generalization. It's more than just meatiness; there's a sense in which singular learning theory is a non-negotiable prerequisite for any theory of deep learning. Let's dig in.
Back to the Bayes-ics
Singular learning theory begins with four things:
Here, I'm follow the original formulation and notation of Watanabe [1]. Note that most of this presentation transfers straightforwardly from the context of density estimation (modeling q(x)) to other problems like regression and classification (modeling q(y|x)) [2]. (I also am deeply indebted to Carroll's Msc. Thesis [2] and the wonderful seminars and notes at metauni [3])
The lower-level aim of "learning" is to find the optimal weights for the given dataset. As good Bayesians, this has a very specific and constrained meaning:
p(w|Dn)=p(Dn|w) φ(w)p(Dn).The higher-level aim of "learning" is to find the optimal model class/architecture, p(x|w), for the given dataset. Rather than try to find the weights that maximize the likelihood or even the posterior, the true aim of a Bayesian is to find the model that maximizes the model evidence,
p(Dn)=∫Wp(Dn|w) φ(w) dw.The fact that the Bayesian paradigm can integrate out its weights to make statements over entire model classes is one of its main strengths. The fact that this integral is
oftenalmost always intractable is one of its main weaknesses. So the Bayesians make a concession to the frequentists with a much more tractable Laplace approximation: we find a choice of weights, w(0), that maximizes the likelihood and then approximate the distribution as Gaussian in the vicinity of that point.This is justified on the grounds that as the dataset grows (n→∞), thanks to the central limit theorem, the distribution becomes asymptotically normal (cf. physicists and their "every potential is a harmonic oscillator if you look closely enough / keep on lowering the temperature.").
From this approximation, a bit more math leads us to the following asymptotic form for the negative log evidence (in the limit n→∞):
−logp(Dn)≈−logp(Dn|w0)accuracy+d2lognsimplicity,where d is the dimensionality of parameter space.
This formula is known as the Bayesian Information Criterion (BIC), and it (like the related Akaike information criterion) formalizes Occam's razor in the language of Bayesian statistics. We can end up with models that perform worse as long as they compensate by being simpler. (For the algorithmic-complexity-inclined, the BIC has an alternate interpretation as a device for minimizing the description length in an optimal coding context.)
Unfortunately, the BIC is wrong. Or at least the BIC doesn't apply for any of the models we actually care to study. Fortunately, singular learning theory can compute the correct asymptotic form and reveal its much broader implications.
Statistical learning theory is built on a lie
The key insight of Watanabe is that when the parameter-function map,
W∋w→p(⋅|w)is not one-to-one, things get weird. That is, when different choices of weights implement the same functions, the tooling of conventional statistical learning theory breaks down. We call such models "non-identifiable".
Take the example of the Laplace approximation. If there's a local continuous symmetry in weight space, i.e., some direction you can walk that doesn't affect the probability density, then your density isn't locally Gaussian.
Even if the symmetries are non-continuous, the model will not in general be asymptotically normal. In other words, the standard central limit theorem does not hold.
The same problem arises if you're looking at loss landscapes in standard presentations of machine learning. Here, you'll find attempts to measure basin volume by fitting a paraboloid to the Hessian of the loss landscape at the final trained weights. It's the same trick, and it runs into the same problem.
This isn't the kind of thing you can just solve by adding a small ϵ to the Hessian and calling it a day. There are ways to recover "volumes", but they require care. So, as a practical takeaway, if you ever find yourself adding ϵ to make your Hessians invertible, recognize that those zero directions are important to understanding what's really going on in the network. Offer those eigenvalues the respect they deserve.
The consequence of these zeros (and, yes, they really exist in NNs) is that they reduce the effective dimensionality of your model. A step in these directions doesn't change the actual model being implemented, so you have fewer parameters available to "do things" with.
So the basic problem is this: almost all of the models we actually care about (not just neural networks, but Bayesian networks, HMMs, mixture models, Boltzmann machines, etc.) are loaded with symmetries, and this means we can't apply the conventional tooling of statistical learning theory.
Learning is physics with likelihoods
Let's rewrite our beloved Bayes' update as follows,
p(w|Dn)=1Znφ(w) e−nβLn(w),where Ln(w) is the negative log likelihood,
Ln(w):=−1nlogp(Dn|w)=−1nn∑i=1logp(xi|w),and Zn is the model evidence,
Zn:=p(Dn)=∫Wφ(w) e−nβLn(w) dw.Notice that we've also snuck in an inverse "temperature", β>0, so we're now in the tempered Bayes paradigm [4].
The immediate aim of this change is to emphasize the link with physics, where Zn is the preferred notation (and "partition function" the preferred name). The information theoretic analogue of the partition function is the free energy,
Fn:=−logZn,which will be the central object of our study.
Under the definition of a Hamiltonian (or "energy function"),
Hn(w):=nLn(w)−1βlogφ(w),the connection is complete: statistical learning theory is just mathematical physics where the Hamiltonian is a random process given by the likelihood and prior. Just as the geometry of the energy landscape determines the behavior of the physical systems we study, the geometry of the log likelihood ends up determining the behavior of the learning systems we study.
In terms of this physical interpretation, the a posteriori distribution is the equilibrium state corresponding to this empirical Hamiltonian. The importance of the free energy is that it is the minimum of the free energy (not of the Hamiltonian) that determines the equilibrium.
Our next step will be to normalize these quantities of interest to make them easier to work with. For the negative log likelihood, this means subtracting its minimum value.[3]
But that just gives us the KL divergence,
Kn(w)=L0n(w):=Ln(w)−Sn=1nn∑i=1logq(Xi)p(Xi|w),where Sn is the empirical entropy,
Sn:=−1nn∑i=1logq(Xi),a term that is independent of w.
Similarly, we normalize the partition function to get
Z0n=Zn∏ni=1q(Xi)β.and the free energy to get
F0n=−logZ0n.This lets us rewrite the posterior as
p(w|Dn)=1Z0n φ(w) e−nβKn(w).The more important aim of this conversion is that now the minima of the term in the exponent, K(w), are equal to 0. If we manage to find a way to express K(w) as a polynomial, this lets us to pull in the powerful machinery of algebraic geometry, which studies the zeros of polynomials. We've turned our problem of probability theory and statistics into a problem of algebra and geometry.
Why "singular"?
Singular learning theory is "singular" because the "singularities" (where the tangent is ill-defined) of the set of your loss function's minima,
W0:={w0∈W|K(w0)=0},determine the asymptotic form of the free energy. Mathematically, W0 is an algebraic variety, which is just a manifold with optional singularities where it does not have to be locally Euclidean.
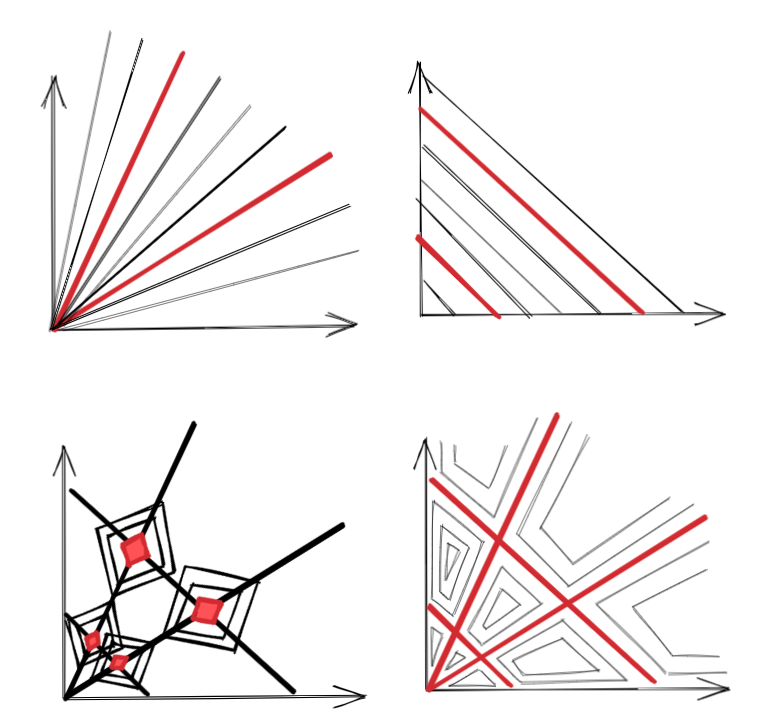
By default, it's difficult to study these varieties close to their singularities. In order to do so anyway, we need to "resolve the singularities." We construct another well-behaved geometric object whose "shadow" is the original object in a way that this new system keeps all the essential features of the original.
It'll help to take a look at the following figure. The main idea behind resolution of singularities is to create a new manifold U and a map g:U→W, such that K(g(u)) is a polynomial in the local coordinates of U. We "disentangle" the singularities so that in our new coordinates they cross "normally".
Because this "blow up" creates a new object, we have to be careful that the quantities we end up measuring don't change with the mapping — we want to find the birational invariants.
We are interested in one birational invariant in particular: the real log canonical threshold (RLCT). Roughly, this measures how "bad" a singularity is. More precisely, it measures the "effective dimensionality" near the singularity.
After fixing the central limit theorem to work in singular models, Watanabe goes on to derive the asymptotic form of the free energy as n→∞,
Fn=nβSn+λlogn−(m−1)loglogn+FR(ξ)+op(1),where, λ is the RLCT, m is the "multiplicity" associated to the RLCT, FR(ξ) is a (well-behaved) random variable, and op(1) is a random variable that converges (in probability) to zero.
The important observation here is that the global behavior of your model is dominated by the local behavior of its "worst" singularities.
For regular (=non-singular) models, the RLCT is d/2, and with the right choice of inverse temperature, the formula above simplifies to
Fn≈nSn+d2logn(for regular models),which is just the BIC, as expected.
The free energy formula generalizes the BIC from classical learning theory to singular learning theory, which strictly includes regular learning theory as a special case. We see that singularities act as a kind of implicit regularization that penalizes models with higher effective dimensionality.
Phase transitions are singularity manipulations
Minimizing the free energy is maximizing the model evidence, which, as we saw, is the preferred Bayesian way of doing model selection. Other paradigms may disagree[4], but at least among us this makes minimizing the free energy the central aim of statistical learning.
As in statistical learning, so in physics.
In physical systems, we distinguish microstates, such as the particular position and speed of every particle in a gas, with macrostates, such as the values of the volume and pressure. The fact that the mapping from microstates to macrostates is not one-to-one is the starting point for statistical physics: uniform distributions over microstates lead to much more interesting distributions over macrostates.
Often, we're interested in how continuously varying our levers (like temperature or the positions of the walls containing our gas) leads to discontinuous changes in the macroscopic parameters. We call these changes phase transitions.
The free energy is the central object of study because its derivatives generate the quantities we care about (like entropy, heat capacity, and pressure). So a phase transition means a discontinuity in one of the free energy's derivatives.
So too, in the setting of Bayesian inference, the free energy generates the quantities we care about, which are now quantities like the expected generalization loss,
Gn=EXn+1[Fn+1]−Fn.Except for the fact that the number of samples, n, is discrete, this is just a derivative.[5]
So too, in learning, we're interested in how continuously changing either the model or the truth leads to discrete changes in the functions we implement and, thereby, to discontinuities in the free energy and its derivatives.
One way to subject this question to investigation is to study how our models change when we restrict our models to some subset of parameter space, W(i)⊂W. What happens when as vary this subset?
Recall that the free energy is defined as the negative log of the partition function. When we restrict ourselves to W(i), we derive a restricted free energy,
Fn(W(i)):=−logZn(W(i))=−log∫W(i)⊂Wφ(w) e−nβLn(w) dw=nβSn(W(i))+λ(i)logn−(m(i)−1)loglogn+FR(ξ)+op(1),which has a completely analogous asymptotic form (after swapping out the integrals over all of weight space with integrals over just this subset). The important difference is that the RLCT in this equation is the RLCT associated to the largest singularity in W(i) rather than the largest singularity in W.
What we see, then, is that phase transitions during learning correspond to discrete changes in the geometry of the "local" (=restricted) loss landscape. The expected behavior for models in these sets is determined by the largest nearby singularities.
In this light, the link with physics is not just the typical arrogance of physicists asserting themselves on other people's disciplines. The link goes much deeper.
Physicists have known for decades that the macroscopic behavior of the systems we care about is the consequence of critical points in the energy landscape: global behavior is dominated by the local behavior of a small set of singularities. This is true everywhere from statistical physics and condensed matter theory to string theory. Singular learning theory tells us that learning machines are no different: the geometry of singularities is fundamental to the dynamics of learning and generalization.
Neural networks are freaks of symmetries
The trick behind why neural networks generalize so well is something like their ability to exploit symmetry. Many models take advantage of the parameter-function map not being one-to-one. Neural networks take this to the next level.
There are discrete permutation symmetries, where you can flip two columns in one layer as long as you flip the two corresponding rows in the next layer, e.g.,
⎛⎜⎝abcdefghi⎞⎟⎠⋅⎛⎜⎝jklmnopqr⎞⎟⎠=⎛⎜⎝bacedfhgi⎞⎟⎠⋅⎛⎜⎝mnojklpqr⎞⎟⎠There are scaling symmetries associated to ReLU activations,
ReLU(x)=1αReLU(αx),α>0,and associated to layer norm,
LayerNorm(αx)=LayerNorm(x),α>0.(Note: these are often broken by the presence of regularization.)
And there's a GLn symmetry associated to the residual stream (you can multiply the embedding matrix by any invertible matrix as long as you apply the inverse of that matrix before the attention blocks, the MLP layers, and the unembedding layer, and if you apply the matrix after each attention block and MLP layer).
But these symmetries aren't actually all that interesting. That's because they're generic. They're always present for any choice of w. The more interesting symmetries are non-generic symmetries that depend on w.
It's the changes in these symmetries that correspond to phase transitions in the posterior; this is the mechanism by which neural networks are able to change their effective dimensionality.
These non-generic symmetries include things like a degenerate node symmetry, which is the well-known case in which a weight is equal to zero and performs no work, and a weight annihilation symmetry in which multiple weights are non-zero but combine to have an effective weight of zero.
The consequence is that even if our optimizers are not performing explicit Bayesian inference, these non-generic symmetries allow the optimizers to perform a kind of internal model selection. There's a trade-off between lower effective dimensionality and higher accuracy that is subject to the same kinds of phase transitions as discussed in the previous section.
The dynamics may not be exactly the same, but it is still the singularities and geometric invariants of the loss landscape that determine the dynamics.
Discussion and limitations
All of the preceding discussion holds in general for any model where the parameter-function mapping is not one-to-one. When this is the case, singular learning theory is less a series of interesting and debate-worthy conjectures than a necessary frame.
The more important question is whether this theory actually tells us anything useful in practice. Quantities like the RLCT are exceedingly difficult to calculate for realistic systems, so can we actually put this theory to use?
I'd say the answer is a tentative yes. Results so far suggest that the predictions of SLT hold up to experimental scrutiny — the predicted phase transitions are actually observable for small toy models.
That's not to say there aren't limitations. I'll list a few from here [3] and a few of my own.
Before we get to my real objections, here are a few objections I think aren't actually good objections:
My real objections are as follows:
Where do we go from here?
I hope you've enjoyed this taster of singular learning theory and its insights: the sense of learning theory as physics with likelihoods, of learning as the thermodynamics of loss, of generalization as the presence of singularity, and of the deep, universal relation between global behavior and the local geometry of singularities.
The work is far from done, but the possible impact for our understanding of intelligence is profound.
To close, let me share one of directions I find most exciting — that of singular learning theory as a path towards predicting the scaling laws we see in deep learning models [5].
There's speculation that we might be able to transfer the machinery of the renormalization group, a set of techniques and ideas developed in physics to deal with critical phenomena and scaling, to understand phase transitions in learning machines, and ultimately to compute the scaling coefficients from first principles.
To borrow Dan Murfet's call to arms [3]:
References
[1]: Watanabe 2009
[2]: Carroll 2021
[3]: Metauni 2021-2023 (Super awesome online lecture series hosted in Roblox that you should all check out.)
[4]: Guedj 2019
[5]: Kaplan 2020
The dimensionality of the optimal parameters also depends on the true distribution generating your distribution, but even if the set of optimal parameters is zero-dimensional, the presence of level sets elsewhere can still affect learning and generalization.
And from the underlying true distribution.
To be precise, this rests on the assumption of realizability — that there is some weight w0 for which p(x|w0) equals q(x) almost everywhere. In this case, the minimum value of the negative log likelihood is the empirical entropy.
They are, of course, wrong.
So n is really a kind of inverse temperature, like β. Increasing the number of samples decreases the effective temperature, which brings us closer to the (degenerate) ground state.
A word with a specific technical sense but that is related to renormalization in statistical physics.