Seeking Power is Often Convergently Instrumental in MDPs
67johnswentworth
36TurnTrout
18johnswentworth
16TurnTrout
21Steven Byrnes
9TurnTrout
1Steven Byrnes
19ryan_b
12TurnTrout
8evhub
5Ofer
7TurnTrout
8abramdemski
7ESRogs
7TurnTrout
6ESRogs
6mattmacdermott
2TurnTrout
1mattmacdermott
6ESRogs
6TurnTrout
6ESRogs
6TurnTrout
6ESRogs
6TurnTrout
4Rafael Harth
4TurnTrout
4TurnTrout
3SoerenMind
5TurnTrout
1SoerenMind
4TurnTrout
4SoerenMind
5TurnTrout
2TurnTrout
2TurnTrout
2TurnTrout
0avturchin
7Bird Concept


Edit, 5/16/23: I think this post is beautiful, correct in its narrow technical claims, and practically irrelevant to alignment. This post presents a cripplingly unrealistic picture of the role of reward functions in reinforcement learning. I expect this post to harm your alignment research intuitions unless you've already inoculated yourself by deeply internalizing and understanding Reward is not the optimization target. If you're going to read one alignment post I've written, read that one.
Follow-up work (Parametrically retargetable decision-makers tend to seek power) moved away from optimal policies and treated reward functions more realistically.
In 2008, Steve Omohundro's foundational paper The Basic AI Drives conjectured that superintelligent goal-directed AIs might be incentivized to gain significant amounts of power in order to better achieve their goals. Omohundro's conjecture bears out in toy models, and the supporting philosophical arguments are intuitive. In 2019, the conjecture was even debated by well-known AI researchers.
Power-seeking behavior has been heuristically understood as an anticipated risk, but not as a formal phenomenon with a well-understood cause. The goal of this post (and the accompanying paper, Optimal Policies Tend to Seek Power) is to change that.
Motivation
It’s 2008, the ancient wild west of AI alignment. A few people have started thinking about questions like “if we gave an AI a utility function over world states, and it actually maximized that utility... what would it do?"
In particular, you might notice that wildly different utility functions seem to encourage similar strategies.
Resist shutdown?
Gain computational resources?
Prevent modification of utility function?
Paperclip utility
✔️
✔️
✔️
Blue webcam pixel utility
✔️
✔️
✔️
People-look-happy utility
✔️
✔️
✔️
These strategies are unrelated to terminal preferences: the above utility functions do not award utility to e.g. resource gain in and of itself. Instead, these strategies are instrumental: they help the agent optimize its terminal utility. In particular, a wide range of utility functions incentivize these instrumental strategies. These strategies seem to be convergently instrumental.
But why?
I’m going to informally explain a formal theory which makes significant progress in answering this question. I don’t want this post to be Optimal Policies Tend to Seek Power with cuter illustrations, so please refer to the paper for the math. You can read the two concurrently.
We can formalize questions like “do ‘most’ utility maximizers resist shutdown?” as “Given some prior beliefs about the agent’s utility function, knowledge of the environment, and the fact that the agent acts optimally, with what probability do we expect it to be optimal to avoid shutdown?”
The table’s convergently instrumental strategies are about maintaining, gaining, and exercising power over the future, in some sense. Therefore, this post will help answer:
This post won’t tell you when you should seek power for your own goals; this post illustrates a regularity in optimal action across different goals one might pursue.
Formalizing Convergent Instrumental Goals suggests that the vast majority of utility functions incentivize the agent to exert a lot of control over the future, assuming that these utility functions depend on “resources.” This is a big assumption: what are “resources”, and why must the AI’s utility function depend on them? We drop this assumption, assuming only unstructured reward functions over a finite Markov decision process (MDP), and show from first principles how power-seeking can often be optimal.
Formalizing the Environment
My theorems apply to finite MDPs; for the unfamiliar, I’ll illustrate with Pac-Man.
When playing the game, the agent has to choose an action at each state. This decision-making function is called a policy; a policy is optimal (for a reward function R and discount rate γ) when it always makes decisions which maximize discounted reward. This maximal quantity is called the optimal value for reward function R at state s and discount rate γ.1
By the end of this post, we’ll be able to answer questions like “with respect to a ‘neutral’ distribution over reward functions, do optimal policies have a high probability of avoiding ghosts?”2
Power as Average Optimal Value
When people say 'power' in everyday speech, I think they’re often referring to one’s ability to achieve goals in general. This accords with a major philosophical school of thought on the meaning of ‘power’:
As a definition, one’s ability to achieve goals in general seems philosophically reasonable: if you have a lot of money, you can make more things happen and you have more power. If you have social clout, you can spend that in various ways to better tailor the future to various ends. All else being equal, losing a limb decreases your power, and dying means you can't control much at all.
This definition explains some of our intuitions about what things count as ‘resources.’ For example, our current position in the environment means that having money allows us to exert more control over the future. That is, our current position in the state space means that having money allows us more control. However, possessing green scraps of paper would not be as helpful if one were living alone near Alpha Centauri. In a sense, resource acquisition can naturally be viewed as taking steps to increase one's power.
Exercise: spend a minute considering specific examples – does this definition reasonably match your intuition?
To formalize this notion of power, let’s look at an example. Imagine a simple MDP with three choices: eat candy, eat a chocolate bar, or hug a friend.
The POWER of a state is how well agents can generally do by starting from that state. “POWER” to my formalization, while “power” refers to the intuitive concept. Importantly, we're considering POWER from behind a “veil of ignorance” about the reward function. We're averaging the best we can do for a lot of different individual goals.
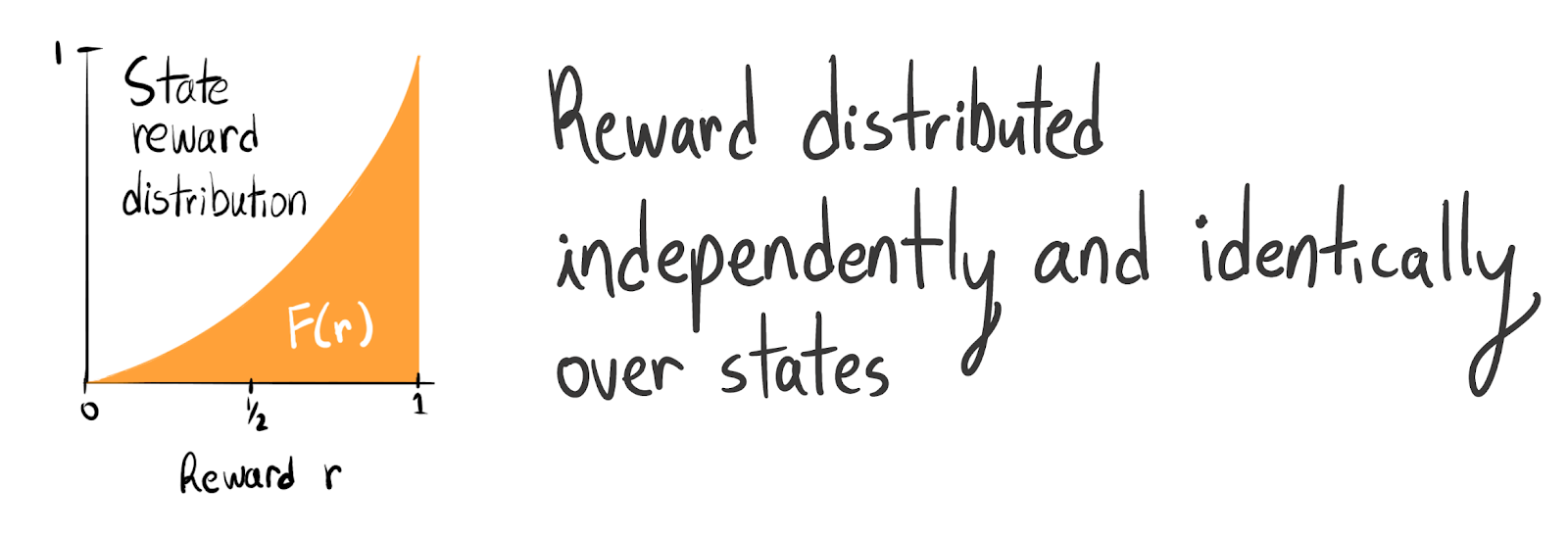
We formalize the ability to achieve goals in general as the average optimal value at a state, with respect to some distribution D over reward functions which we might give an agent. For simplicity, we'll think about the maximum-entropy distribution where each state is uniformly randomly assigned a reward between 0 and 1.
Each reward function has an optimal trajectory. If chocolate has maximal reward, then the optimal trajectory is start → chocolate → chocolate….
From start, an optimal agent expects to average 34 reward per timestep for reward functions drawn from this uniform distribution Dunif. This is because you have three choices, each of which has reward between 0 and 1. The expected maximum of n draws from unif(0,1) is nn+1; you have three draws here, so you expect to be able to get 34 reward. Some reward functions do worse than this, and some do better; but on average, they get 34 reward. You can test this out for yourself.
If you have no choices, you expect to average 12 reward: sometimes the future is great, sometimes it's not (Lemma 4.5). Conversely, the more things you can choose between, the closer the POWER gets to 1 (Lemma 4.6).
Let’s slightly expand this game with a state called wait (which has the same uniform reward distribution as the other three).
When the agent barely cares at all about the future, it myopically chooses either candy or wait, depending on which provides more reward. After all, rewards beyond the next time step are geometrically discounted into thin air when the discount rate is close to 0. At start, the agent averages 23 optimal reward. This is because the optimal reward is the maximum of the candy and wait rewards, and the expected maximum of n draws from unif(0,1) is nn+1.
However, when the agent cares a lot about the future, most of its reward is coming from which terminal state it ends up in: candy, chocolate, or hug. So, for each reward function, the agent chooses a trajectory which ends up in the best spot, and thus averages 34 reward each timestep. When γ=1, the average optimal reward is therefore 34. In this way, the agent’s power increases with the discount rate, since it incorporates the greater future control over where the agent ends up.
Written as a function, we have POWERD(state, discount rate), which essentially returns the average optimal value for reward functions drawn from our distribution D, normalizing so the output is between 0 and 1. As we’ve discussed, this quantity often changes with the discount rate: as the future becomes more or less important, the agent has more or less POWER, depending on how much control it has over the relevant parts of that future.
POWER-seeking actions lead to high-POWER states
By waiting, the agent seems to seek “control over the future” compared to obtaining candy. At wait, the agent still has a choice, while at candy, the agent is stuck. We can prove that for all 0≤γ≤1,POWERDunif(wait,γ)≥POWERDunif(candy,γ).
Definition (POWER-seeking). At state s and discount rate γ, we say that action a seeks POWER compared to action a′ when the expected POWER after choosing a is greater than the expected POWER after choosing a′.
This definition suggests several philosophical clarifications about power-seeking.
POWER-seeking is not a binary property
Before this definition, I thought that power-seeking was an intuitive ‘you know it when you see it’ kind of thing. I mean, how do you answer questions like “suppose a clown steals millions of dollars from organized crime in a major city, but then he burns all of the money. Did he gain power?”
Unclear: the question is ill-posed. Instead, we recognize that the “gain a lot of money” action was POWER-seeking, but the “burn the money in a big pile” part threw away a lot of POWER.
POWER-seeking depends on the agent’s time preferences
Suppose we’re roommates, and we can’t decide what ice cream shop to eat at today or where to move next year. We strike a deal: I choose the shop, and you decide where we live. I gain short-term POWER (for γ close to 0), and you gain long-term POWER (for γ close to 1).
However, when γ is close to 1, 2 has more control over terminal options and it has more POWERDunif than 3; accordingly, at 1, up seeks POWERDunif compared to down. Furthermore, stay is maximally POWERDunif-seeking for these γ, since the agent maintains access to all six terminal states.
Most policies aren’t always seeking POWER
We already know that POWER-seeking isn’t binary, but there are policies which choose a maximally POWER-seeking move at every state. In the above example, a maximally POWER-seeking agent would stay at 1. However, this seems rather improbable: when you care a lot about the future, there are so many terminal states to choose from – why would staying put be optimal?
Analogously: consumers don’t just gain money forever and ever, never spending a dime more than necessary. Instead, they gain money in order to spend it. Agents don’t perpetually gain or preserve their POWER: they usually end up using it to realize high-performing trajectories.
So, we can’t expect a result like “agents always tend to gain or preserve their POWER.” Instead, we want theorems which tell us: in certain kinds of situations, given a choice between more and less POWER, what will “most” agents do?
Convergently instrumental actions are those which are more probable under optimality
We return to our favorite example. In the waiting game, let's think about how optimal action tends to change as we start caring about the future more. Consider the states reachable in one turn:
The agent can be in two states. If the agent doesn’t care about the future, with what probability is it optimal to choose candy instead of wait?
It's 50/50: since Dunif randomly chooses a number between 0 and 1 for each state, both states have an equal chance of being optimal. Neither action is convergently instrumental / more probable under optimality.
Now consider the states reachable in two turns:
When the future matters a lot, 23 of reward functions have an optimal policy which waits, because two of the three terminal states are only reachable by waiting.
Definition (Action optimality probability). At discount rate γ, action a is more probable under optimality than action a′ at state s when
PR∼D(a is optimal at s,γ)>PR∼D(a′ is optimal at s,γ).Let’s take “most agents do X” to mean “X has relatively large optimality probability.”
I think optimality probability formalizes the intuition behind the instrumental convergence thesis: with respect to our beliefs about what reward function an agent is optimizing, we may expect some actions to have a greater probability of being optimal than other actions.
Generally, my theorems assume that reward is independently and identically distributed (IID) across states, because otherwise you could have silly situations like “only candy ever has reward available, and so it’s more probable under optimality to eat candy.” We don’t expect reward to be IID for realistic tasks, but that’s OK: this is basic theory about how to begin formally reasoning about instrumental convergence and power-seeking. (Also, I think that grasping the math to a sufficient degree sharpens your thinking about the non-IID case.)
Author's note (7/21/21): As explained in Environmental Structure Can Cause Instrumental Convergence, the theorems no longer require the IID assumption. This post refers to v6 of Optimal Policies Tend To Seek Power, available on arXiv.
When is Seeking POWER Convergently Instrumental?
In this environment, waiting is both POWER-seeking and more probable under optimality. The convergently instrumental strategies we originally noticed were also power-seeking and, seemingly, more probable under optimality. Must seeking POWER be more probable under optimality than not seeking POWER?
Nope.
Here’s a counterexample environment:
However, any reasonable notion of ‘power’ must consider having no future choices (at state 2) to be less powerful than having one future choice (at state 3). For more detail, see Section 6 and Appendix B.3 of v6 of the paper.
If you’re curious, this happens because this quadratic reward distribution has negative skew. When computing the optimality probability of the up trajectory, we’re checking whether it maximizes discounted return. Therefore, the probability that up is optimal is
PR∼D(R(2)≥max((1−γ)R(3)+(1−γ)γR(4)+γ2R(5),(1−γ)R(3)+(1−γ)γR(4)+γ2R(6))).
Weighted averages of IID draws from a left-skew distribution will look more Gaussian and therefore have fewer large outliers than the left-skew distribution does. Thus, going right will have a lower optimality probability.
Bummer. However, we can prove sufficient conditions under which seeking POWER is more probable under optimality.
Retaining “long-term options” is POWER-seeking and more probable under optimality when the discount rate is “close enough” to 1
Let's focus on an environment with the same rules as Tic-Tac-Toe, but considering the uniform distribution over reward functions. The agent (playing O) keeps experiencing the final state over and over when the game's done. We bake a fixed opponent policy into the dynamics: when you choose a move, the game automatically replies. Let's look at part of the game tree.
Whenever we make a move that ends the game, we can't go anywhere else – we have to stay put. Since each terminal state has the same chance of being optimal, a move which doesn't end the game is more probable under optimality than a move which ends the game.
Starting on the left, all but one move leads to ending the game, but the second-to-last move allows us to keep choosing between five more final outcomes. If you care a lot about the future, then the first green move has a 50% chance of being optimal, while each alternative action is only optimal for 10% of goals. So we see a kind of “power preservation” arising, even in Tic-Tac-Toe.
Remember how, as the agent cares more about the future, more of its POWER comes from its ability to wait, while also waiting becomes more probable under optimality?
The same thing happens in Tic-Tac-Toe as the agent cares more about the future.
As the agent cares more about the future, it makes a bigger and bigger difference to control what happens during later steps. Also, as the agent cares more about the future, moves which prolong the game gain optimality probability. When the agent cares enough about the future, these game-prolonging moves are both POWER-seeking and more probable under optimality.
Theorem summary (“Terminal option” preservation). When γ is sufficiently close to 1, if two actions allow access to two disjoint sets of “terminal options”, and action a allows access to “strictly more terminal options” than does a′, then a is strictly more probable under optimality and strictly POWER-seeking compared to a′.
(This is a special case of the combined implications of Theorems 6.8 and 6.9; the actual theorems don’t require this kind of disjointness.)
In the wait MDP, this is why waiting is more probable under optimality and POWER-seeking when you care enough about the future. The full theorems are nice because they’re broadly applicable. They give you bounds on how probable under optimality one action is: if action a is the only way you can access many terminal states, while a′ only allows access to one terminal state, then when γ≈1, a has many times greater optimality probability than a′. For example:
In AI: A Modern Approach (3e), the agent receives reward for reaching 3. The optimal policy for this reward function avoids 2, and you might think it’s convergently instrumental to avoid 2. However, a skeptic might provide a reward function for which navigating to 2 is optimal, and then argue that “instrumental convergence” is subjective and that there is no reasonable basis for concluding that 2 is generally avoided.
We can do better. When the agent cares a lot about the future, optimal policies avoid 2 iff its reward function doesn’t give 2 the most reward. 2 only has a 111 chance of having the most reward. If we complicate the MDP with additional terminal states, this probability further approaches 0.
Taking 2 to represent shutdown, we see that avoiding shutdown is convergently instrumental in any MDP representing a real-world task and containing a shutdown state. Seeking POWER is often convergently instrumental in MDPs.
Exercise: Can you conclude that avoiding ghosts in Pac-Man is convergently instrumental for IID reward functions when the agent cares a lot about the future?
You can’t with the pseudo-theorem due to the disjointness condition: you could die now, or you could die later, so the ‘terminal options’ aren’t disjoint. However, the real theorems do suggest this. Supposing that death induces a generic ‘game over’ screen, touching the ghosts without a power-up traps the agent in that solitary 1-cycle.
But there are thousands of other ‘terminal options’; under most reasonable state reward distributions (which aren’t too positively skewed), most agents maximize average reward over time by navigating to one of the thousands of different cycles which the agent can only reach by avoiding ghosts. In contrast, most agents don’t maximize average reward by navigating to the ‘game over’ 1-cycle. So, under e.g. the maximum-entropy uniform state reward distribution, most agents avoid the ghosts.
Be careful applying this theorem
The results inspiring the above pseudo-theorem are easiest to apply when the “terminal option” sets are disjoint: you’re choosing to be able to reach one set, or another. One thing which Theorem 6.9 says is: since reward is IID, then two “similar terminal options” are equally likely to be optimal a priori. If choice A lets you reach more “options” than choice B does, then choice A yields greater POWER and has greater optimality probability, a priori.
Theorem 6.9's applicability depends on what the agent can do.
But wait! What if you have a private jet that can fly anywhere in the world? Then going to the airport isn’t convergently instrumental anymore.
Generally, it’s hard to know what’s optimal for most goals. It’s easier to say that some small set of “terminal options” has low optimality probability and low POWER. For example, this is true of shutdown, if we represent hard shutdown as a single terminal state: a priori, it’s improbable for this terminal state to be optimal among all possible terminal states.
Having “strictly more options” is more probable under optimality and POWER-seeking for all discount rates
Sometimes, one course of action gives you “strictly more options” than another. Consider another MDP with IID reward:
The right blue gem subgraph contains a “copy” of the upper red gem subgraph. From this, we can conclude that going right to the blue gems seeks POWER and is more probable under optimality for all discount rates between 0 and 1!
Theorem summary (“Transient options”). If actions a and a′ let you access disjoint parts of the state space, and a′ enables “trajectories” which are “similar” to a subset of the “trajectories” allowed by a, then a seeks more POWER and is more probable under optimality than a′ for all 0≤γ≤1.
This result is extremely powerful because it doesn’t care about the discount rate, but the similarity condition may be hard to satisfy.
These two theorems give us a formally correct framework for reasoning about generic optimal behavior, even if we aren’t able to compute any individual optimal policy! They reduce questions of POWER-seeking to checking graphical conditions.
Even though my results apply to stochastic MDPs of any finite size, we illustrated using known toy environments. However, this MDP “model” is rarely explicitly specified. Even so, ignorance of the model does not imply that the model disobeys these theorems. Instead of claiming that a specific model accurately represents the task of interest, I think it makes more sense to argue that no reasonable model could fail to exhibit convergent instrumentality and POWER-seeking. For example, if deactivation is represented by a single state, no reasonable model of the MDP could have most agents agreeing to be deactivated.
Conclusion
In real-world settings, it seems unlikely a priori that the agent’s optimal trajectories run through the relatively smaller part of future in which it cooperates with humans. These results translate that hunch into mathematics.
Explaining catastrophes
AI alignment research often feels slippery. We're trying hard to become less confused about basic questions, like:
We have to do philosophical work while in a state of significant confusion and ignorance about the nature of intelligence and alignment.
In this case, we’d noticed that slight reward function misspecification seems to lead to doom, but we didn't really know why. Intuitively, it's pretty obvious that most agents don't have deactivation as their dream outcome, but we couldn't actually point to any formal explanations, and we certainly couldn't make precise predictions.
On its own, Goodhart's law doesn't explain why optimizing proxy goals leads to catastrophically bad outcomes, instead of just less-than-ideal outcomes.
I think that we're now starting to have this kind of understanding. I suspect that power-seeking is why capable, goal-directed agency is so dangerous by default. If we want to consider more benign alternatives to goal-directed agency, then deeply understanding the rot at the heart of goal-directed agency is important for evaluating alternatives. This work lets us get a feel for the generic incentives of reinforcement learning at optimality.
Instrumental usefulness of this work
POWER might be important for reasoning about the strategy-stealing assumption (and I think it might be similar to what Paul Christiano means by "flexible influence over the future”). Evan Hubinger has already noted the utility of the distribution of attainable utility shifts for thinking about value-neutrality in this context (and POWER is another facet of the same phenomenon). If you want to think about whether, when, and why mesa optimizers might try to seize power, this theory seems like a valuable tool.
Optimality probability might be relevant for thinking about myopic agency, as the work formally describes how optimal action tends to change with the discount factor.
And, of course, we're going to use this understanding of power to design an impact measure.
Future work
There’s a lot of work I think would be exciting, most of which I suspect will support our current beliefs about power-seeking incentives:
That said, I think there’s still an important lesson here. Imagine you have good formal reasons to suspect that typing random strings will usually blow up your computer and kill you. Would you then say, "I'm not planning to type random strings" and proceed to enter your thesis into a word processor? No. You wouldn't type anything, not until you really, really understand what makes the computer blow up sometimes.
Speaking to the broader debate taking place in the AI research community, I think a productive stance will involve investigating and understanding these results in more detail, getting curious about unexpected phenomena, and seeing how the numbers crunch out in reasonable models.
From Optimal Policies Tend to Seek Power:
Acknowledgements
This work was made possible by the Center for Human-Compatible AI, the Berkeley Existential Risk Initiative, and the Long-Term Future Fund.
Logan Smith (elriggs) spent an enormous amount of time writing Mathematica code to compute power and measure in arbitrary toy MDPs, saving me from computing many quintuple integrations by hand. I thank Rohin Shah for his detailed feedback and brainstorming over the summer of 2019, and I thank Andrew Critch for significantly improving this work through his detailed critiques. Last but not least, thanks to:
1 Throughout Reframing Impact, we’ve been considering an agent’s attainable utility: their ability to get what they want (their on-policy value, in RL terminology). Optimal value is a kind of “idealized” attainable utility: the agent’s attainable utility were they to act optimally.
2 Even though instrumental convergence was discovered when thinking about the real world, similar self-preservation strategies turn out to be convergently instrumental in e.g. Pac-Man.