This post is a not a so secret analogy for the AI Alignment problem. Via a fictional dialog, Eliezer explores and counters common questions to the Rocket Alignment Problem as approached by the Mathematics of Intentional Rocketry Institute.
MIRI researchers will tell you they're worried that "right now, nobody can tell you how to point your rocket’s nose such that it goes to the moon, nor indeed any prespecified celestial destination."

Popular Comments
Recent Discussion
Concerns over AI safety and calls for government control over the technology are highly correlated but they should not be.
There are two major forms of AI risk: misuse and misalignment. Misuse risks come from humans using AIs as tools in dangerous ways. Misalignment risks arise if AIs take their own actions at the expense of human interests.
Governments are poor stewards for both types of risk. Misuse regulation is like the regulation of any other technology. There are reasonable rules that the government might set, but omission bias and incentives to protect small but well organized groups at the expense of everyone else will lead to lots of costly ones too. Misalignment regulation is not in the Overton window for any government. Governments do not have strong incentives...
(Surely cryonics doesn't matter given a realistic actions space? Usage of cryonics is extremely rare. I agree that simulation arguments and similar considerations maybe imply that "helping current humans" is either incoherant or unimportant.)
(Half-baked work-in-progress. There might be a “version 2” of this post at some point, with fewer mistakes, and more neuroscience details, and nice illustrations and pedagogy etc. But it’s fun to chat and see if anyone has thoughts.)
1. Background
There’s a neuroscience problem that’s had me stumped since almost the very beginning of when I became interested in neuroscience at all (as a lens into AGI safety) back in 2019. But I think I might finally have “a foot in the door” towards a solution!
What is this problem? As described in my post Symbol Grounding and Human Social Instincts, I believe the following:
- (1) We can divide the brain into a “Learning Subsystem” (cortex, striatum, amygdala, cerebellum and a few other areas) on the one hand, and a “Steering Subsystem”
If step 5 is indeed grounded in the spatial attention being on other people, this should be testable! For example, people who pay less spatial attention to other people should feel less intense social emotions - because the steering system circuit gets activated less often and weaker. And I think that is the case. At least ChatGPT has some confirming evidence, though it's not super clear and I haven't yet looked deeper into it.
With my electronic harp mandolin project I've been enjoying working with analog and embedded audio hardware. And a few weeks ago, after reading about Ugo Conti's whistle-controlled synth I wrote to him, he gave me a call, and we had a really interesting conversation. And my existing combination of hardware for my whistle synth [1] is bulky and expensive. Which has me excited about a new project: I'd like to make an embedded version.
Yesterday I got started on the first component: getting audio into the microcontroller. I want to start with a standard dynamic mic, so I can keep using the same mic for talkbox and whistle synth, so it should take standard balanced audio on XLR as input. In a full version this would need an XLR port, but for now I...
Whoops! You're right! Will do.
I like the rough thoughts way though. I'm not here to like read a textbook.
Epistemic Status: Musing and speculation, but I think there's a real thing here.
I.
When I was a kid, a friend of mine had a tree fort. If you've never seen such a fort, imagine a series of wooden boards secured to a tree, creating a platform about fifteen feet off the ground where you can sit or stand and walk around the tree. This one had a rope ladder we used to get up and down, a length of knotted rope that was tied to the tree at the top and dangled over the edge so that it reached the ground.
Once you were up in the fort, you could pull the ladder up behind you. It was much, much harder to get into the fort without the ladder....
Authors: Senthooran Rajamanoharan*, Arthur Conmy*, Lewis Smith, Tom Lieberum, Vikrant Varma, János Kramár, Rohin Shah, Neel Nanda
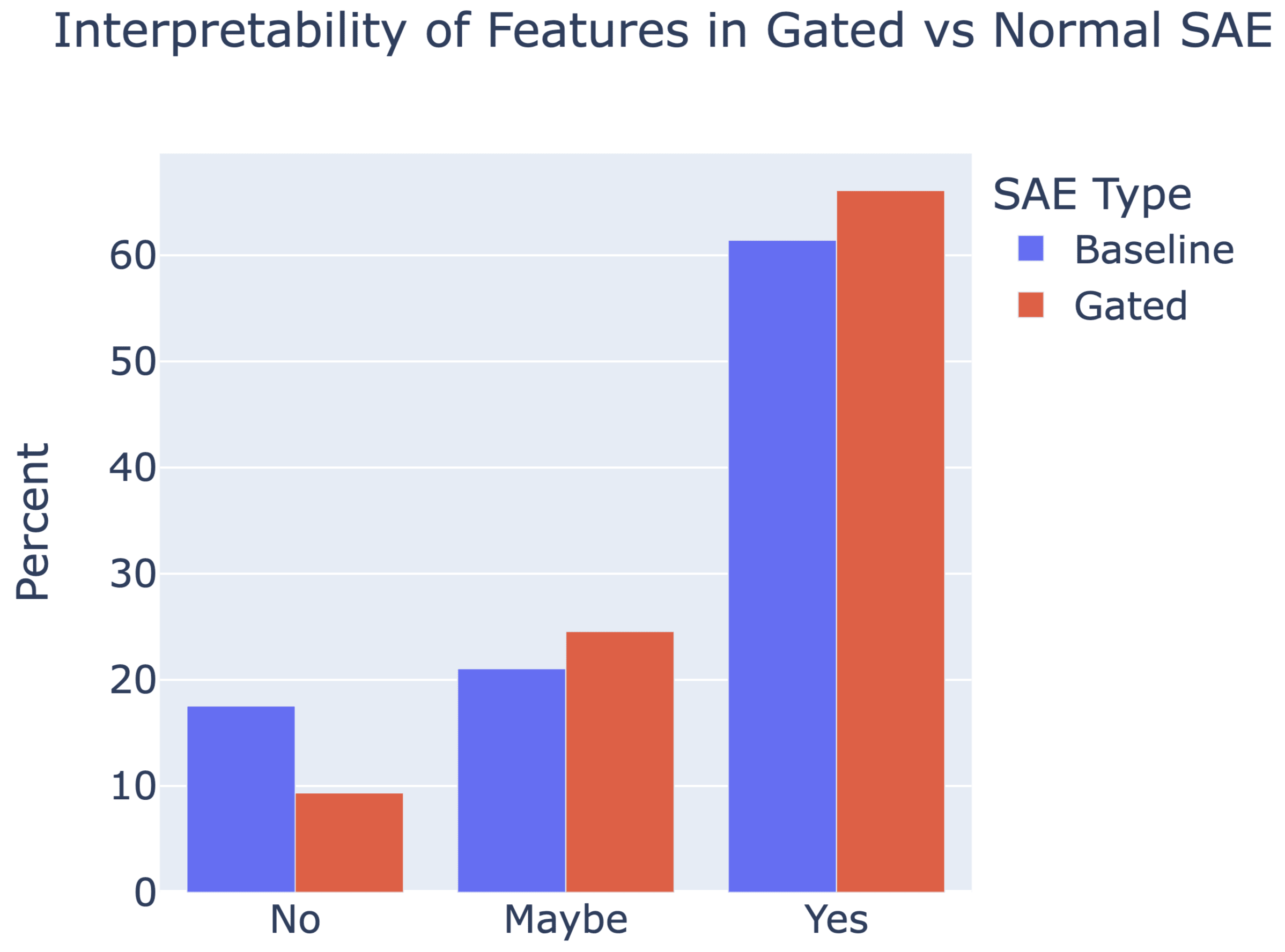
A new paper from the Google DeepMind mech interp team: Improving Dictionary Learning with Gated Sparse Autoencoders!
Gated SAEs are a new Sparse Autoencoder architecture that seems to be a significant Pareto-improvement over normal SAEs, verified on models up to Gemma 7B. They are now our team's preferred way to train sparse autoencoders, and we'd love to see them adopted by the community! (Or to be convinced that it would be a bad idea for them to be adopted by the community!)

They achieve similar reconstruction with about half as many firing features, and while being either comparably or more interpretable (confidence interval for the increase is 0%-13%).
See Sen's Twitter summary, my Twitter summary, and the paper!
We use learning rate 0.0003 for all Gated SAE experiments, and also the GELU-1L baseline experiment. We swept for optimal baseline learning rates on GELU-1L for the baseline SAE to generate this value.
For the Pythia-2.8B and Gemma-7B baseline SAE experiments, we divided the L2 loss by , motivated by wanting better hyperparameter transfer, and so changed learning rate to 0.001 or 0.00075 for all the runs (currently in Figure 1, only attention output pre-linear uses 0.00075. In the rerelease we'll state all the values used). We didn't see n...
If we achieve AGI-level performance using an LLM-like approach, the training hardware will be capable of running ~1,000,000s concurrent instances of the model.
Definitions
Although there is some debate about the definition of compute overhang, I believe that the AI Impacts definition matches the original use, and I prefer it: "enough computing hardware to run many powerful AI systems already exists by the time the software to run such systems is developed". A large compute overhang leads to additional risk due to faster takeoff.
I use the types of superintelligence defined in Bostrom's Superintelligence book (summary here).
I use the definition of AGI in this Metaculus question. The adversarial Turing test portion of the definition is not very relevant to this post.
Thesis
Due to practical reasons, the compute requirements for training LLMs...
This seems correct and important to me.
The history of science has tons of examples of the same thing being discovered multiple time independently; wikipedia has a whole list of examples here. If your goal in studying the history of science is to extract the predictable/overdetermined component of humanity's trajectory, then it makes sense to focus on such examples.
But if your goal is to achieve high counterfactual impact in your own research, then you should probably draw inspiration from the opposite: "singular" discoveries, i.e. discoveries which nobody else was anywhere close to figuring out. After all, if someone else would have figured it out shortly after anyways, then the discovery probably wasn't very counterfactually impactful.
Alas, nobody seems to have made a list of highly counterfactual scientific discoveries, to complement wikipedia's list of multiple discoveries.
To...
Maybe "counterfactually robust" is an OK phrase?
TL;DR: In this post, I distinguish between two related concepts in neural network interpretability: polysemanticity and superposition. Neuron polysemanticity is the observed phenomena that many neurons seem to fire (have large, positive activations) on multiple unrelated concepts. Superposition is a specific explanation for neuron (or attention head) polysemanticity, where a neural network represents more sparse features than there are neurons (or number of/dimension of attention heads) in near-orthogonal directions. I provide three ways neurons/attention heads can be polysemantic without superposition: non--neuron aligned orthogonal features, non-linear feature representations, and compositional representation without features. I conclude by listing a few reasons why it might be important to distinguish the two concepts.
Epistemic status: I wrote this “quickly” in about 12 hours, as otherwise it wouldn’t have come out at all. Think of...
